{kind=link}

|
|
Laurence Newell has sent in some photos and a description of his 4 GHz observatory. This under construction. We are looking forward to the first data!. Laurence is also working on a radio astronomy website. Click on the thumbnails below to view the full quality images.
Telescope
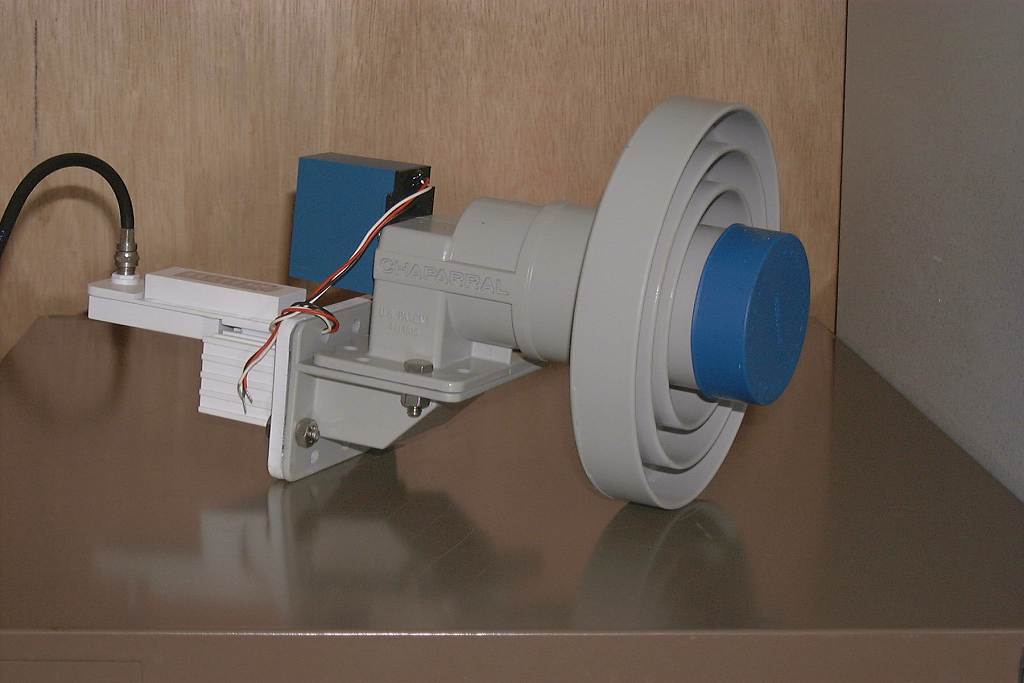
This is the 3m dish as it once was, when mounted on the ground. Fully
steerable azimuth/elevation mount. To be fitted with a 4GHz LNB (also
shown), primarily for solar observations.
|
|
|
I had intended to add a Dicke switch for noise reduction. I have an Icom R8500 receiver (from eBay) as thebackend. The receiver will be driven directly by the Java software (also shown) to give logging, spectroscopy, etc. The whole assembly is being rebuilt on a trailer (also shown).
Lab and Telescope Trailer
The mounting assembly is on a 'sledge' which plugs into the trailer, so in
principle it is possible to slide it off and use the trailer for other
things. However, I think it would need a lot of manpower to plug it back in
again, so I haven't ever removed it.

|
Zenith
This shows the 3m pointing at the zenith, giving a clearer view of the mounting.
The counterweights are made from British Gas pipe! The disk weighs about
40kg, and so needs a bit of help to keep it stable... The pipework is
Aluminium scaffolding, from the local dump (I sandblasted it to make it look
better). The pipes are held together with KeeKlamps, brand new, but from a
scrapyard...

|
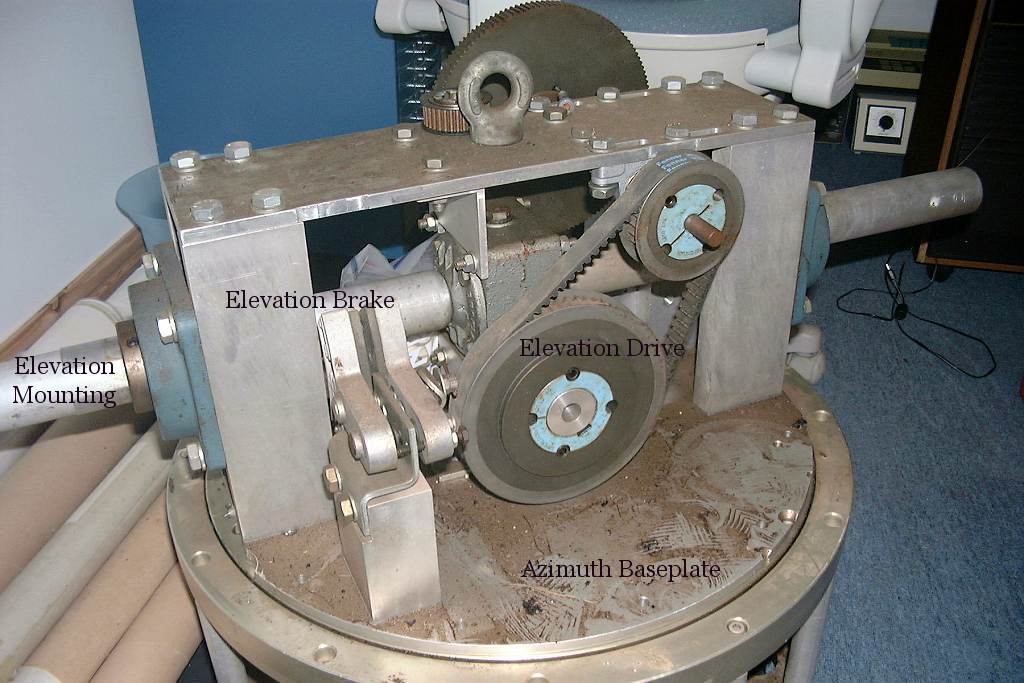
AzEl Assembly
This shows the parts of the azimuth/elevation drive assembly. Driven by two
very high torque stepper motors (800 steps per turn) through a lot of timing
belt gearing. Shaft encoders to give position. Disc brakes to lock the dish
when parked. The bearings are from a combine harvester! Angular resolution
is about 0.1 degree, I think, but backlash will make nonsense of that.
|
Dish mounting
This shows the dish cradle more clearly. I intended to add quite a bit of
extra strength behind the dish in the form of struts connecting the dish to
the counterweight arms, giving a triangular lattice.

|
Lab
This is my mobile lab, made from a box body (the back of a lorry). Fully
insulated and serviced, a home from home - at my parents' place - I live in
a second floor flat!

|
Instrumentation Rack
More for show than practical effect at the moment! The unit at the bottom is
a rack PC, which has been round the world in one of the BT Global Challenge
yachts. This will run the controller software...

|
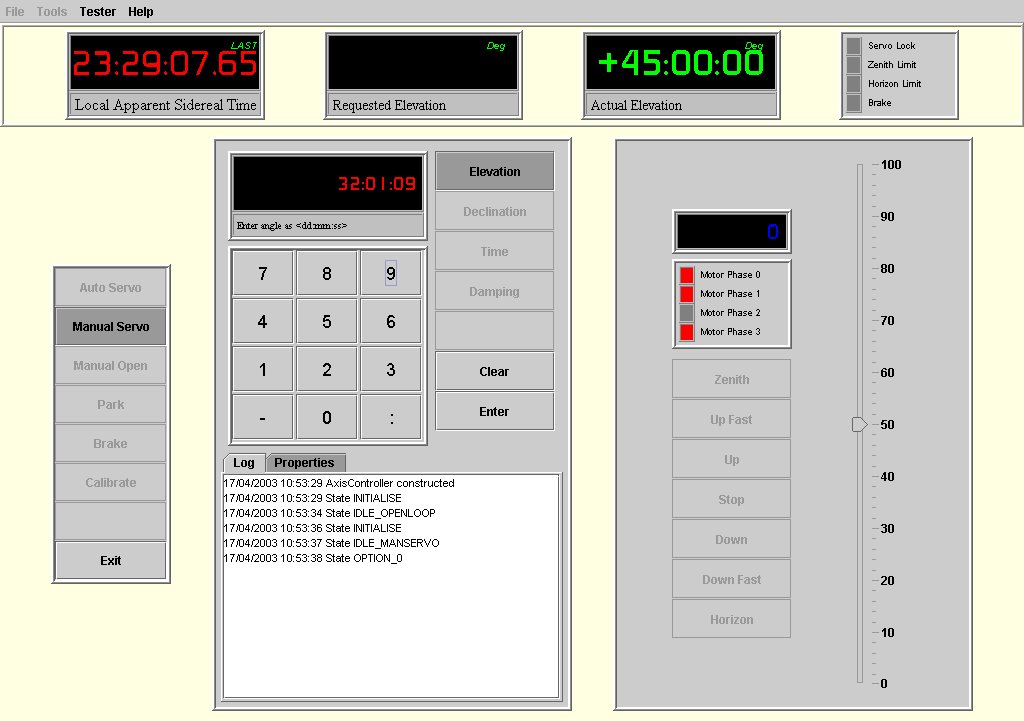
ElevationController
Very prototype Java software, to drive one axis. The software framework has
changed a lot as a result of my horse race results system development (!),
but you get the idea. There's also a star map showing where the telescope is
pointing, and clocks, and.... (not enough hours in the day)
|
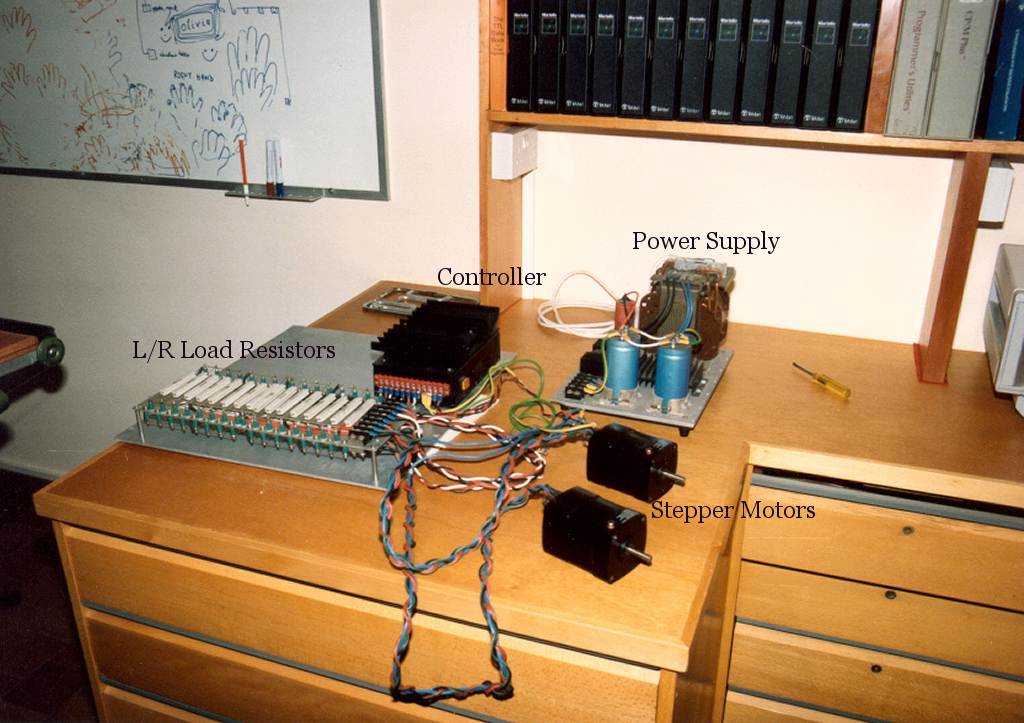
MotorController
The two high torque stepper motors are driven from 60V DC via load resistors
to improve their response speed (L/R, larger R giving reduced time
constant). The resistor array dissipates about 500W, I think (can't really
remember). Would double as a toaster. The controller box is a simple TTL to
FET driver, for each of the four phases. I need a PIC or similar controller
to interface to the Java software.
|